无人驾驶编队试验车辆。主要有三台设备,两台四轮电动车,一台三轮电动车,设备实现的主要功能为单台设备的无人驾驶、轨迹跟踪,多台设备的编队驾驶、车距保持等功能。
系统主要由差分GPS基站、管理控制中心、智能驾驶控制器等组成。加装多种传感器设备,对原有机械结构,电气系统进行相关改造,实现相关功能。系统利用差分GPS基站通过路径拟合算法实现路径规划;伺服驱动器、伺服电机、减速机结合角度传感器实现车辆的转向控制;GPS定位传感器以及用户接收机实现车辆自身的定位,无线通信组网实现车辆之间信息交互,实现车辆编队控制。
实验车辆如图1-2所示。
1、差分GPS基站
(1)主要由基准站和用户接收机(移动站)组成,如图3所示。
(2)通过基准站进行观测,根据已知精密坐标与基准站GPS接收机计算出的坐标,计算出真实坐标与GPS定位得到的坐标的改正数,并由基准站实时将这一数据发送出去。用户接收机在进行GPS观测的同时,也接收到基准站发出的改正数,并对其定位结果进行改正,从而提高定位精度。为系统提供厘米级的定位精度。
2、管理控制中心
(1)主要由ARM控制器和14寸步科触摸屏组成,如图4所示。
(2)ARM控制器设计3路串口,分别作为GPS定位传感器接口、无线通信模块接口、调试接口,设计1路485通讯接口,作为与人机交互界面触摸屏的通信接口。
(3)管理控制中心的主要功能为系统路径规划、下发系统控制指令、监视系统各项参数。
3、智能驾驶控制器
(1)主要由智能驾驶控制器和信息采集板组成,如图5所示。
(2)智能驾驶控制器主要有1路CAN通信,与信息采集板进行数据通信;1路485通信,通过无线通信模块与管理控制中心通信;8路数字量输入接口,8路数字量输出接口,实现相应控制。4路串口,用作开发备用。
(3)信息采集板主要有3路串口,分别用来采集角度传感器中角度信息,差分GPS定位信息,超声波传感器信息。1路CAN通信,将采集到的信息传输给智能驾驶控制器。
4、机械改装部分
方向盘改造,主要设备为伺服驱动器、伺服电机、减速机、同步皮带轮及传动皮带组成。通过减速机用于降低伺服电机转速,增加力矩。同动轴与减速机动力输出轴通过同步带连接。通过控制伺服电机的转动带动方向盘旋转,从而实现车辆方向的自动控制,如图6所示。

图1 四轮无人驾驶实验车

图2 三轮无人驾驶实验小车
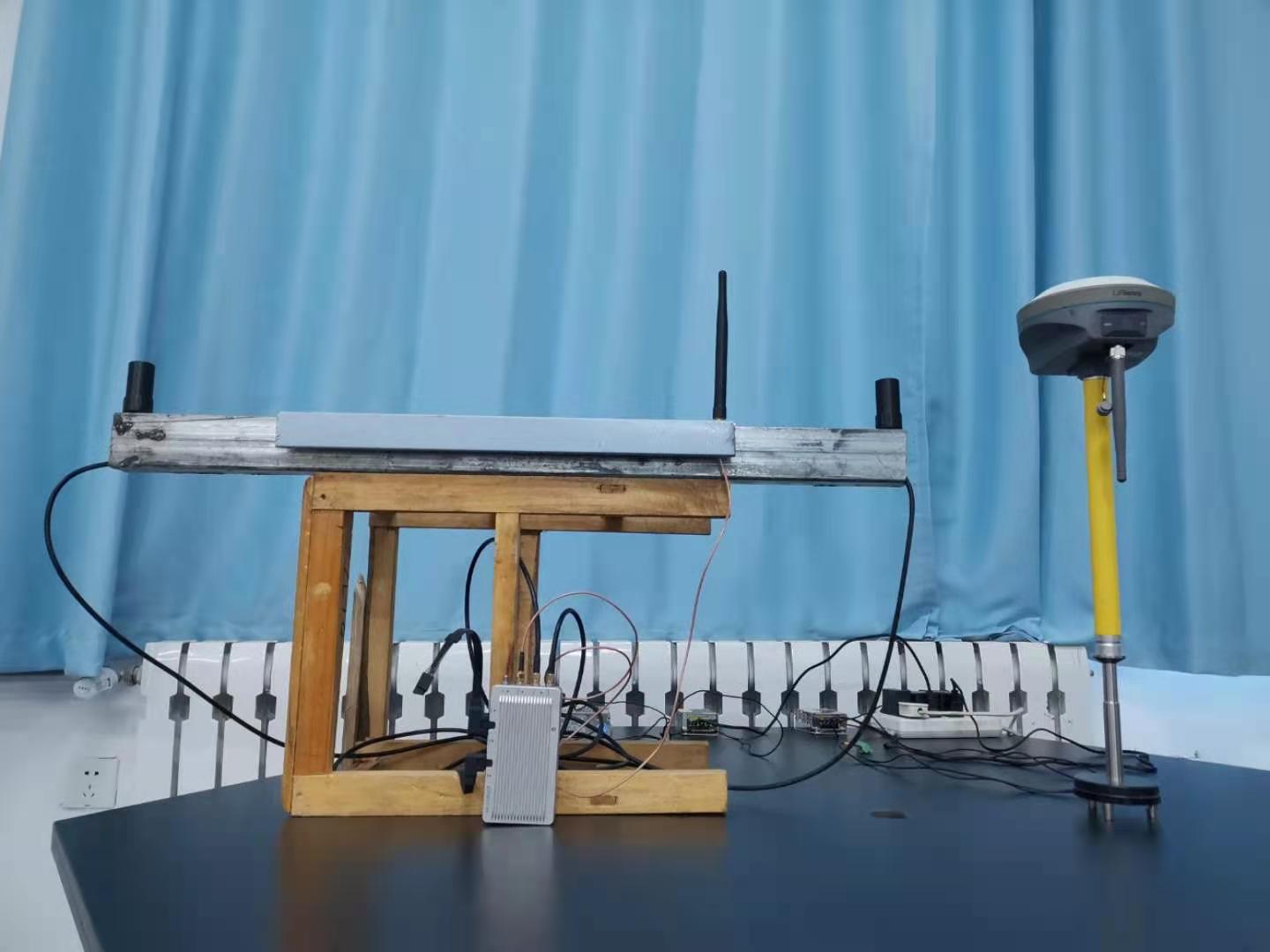
图3 差分GPS基站与用户接收机
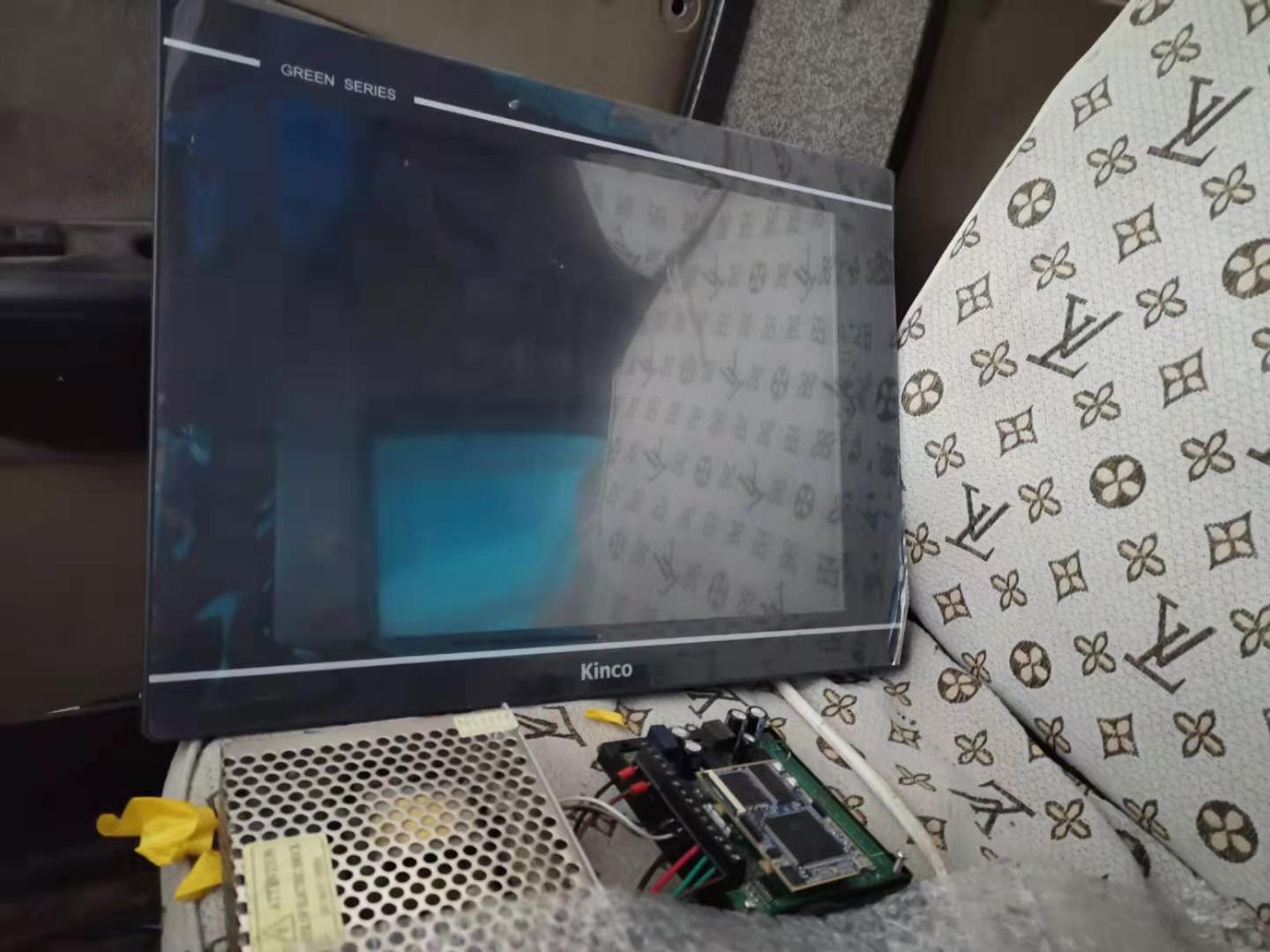
图4 管理控制中心
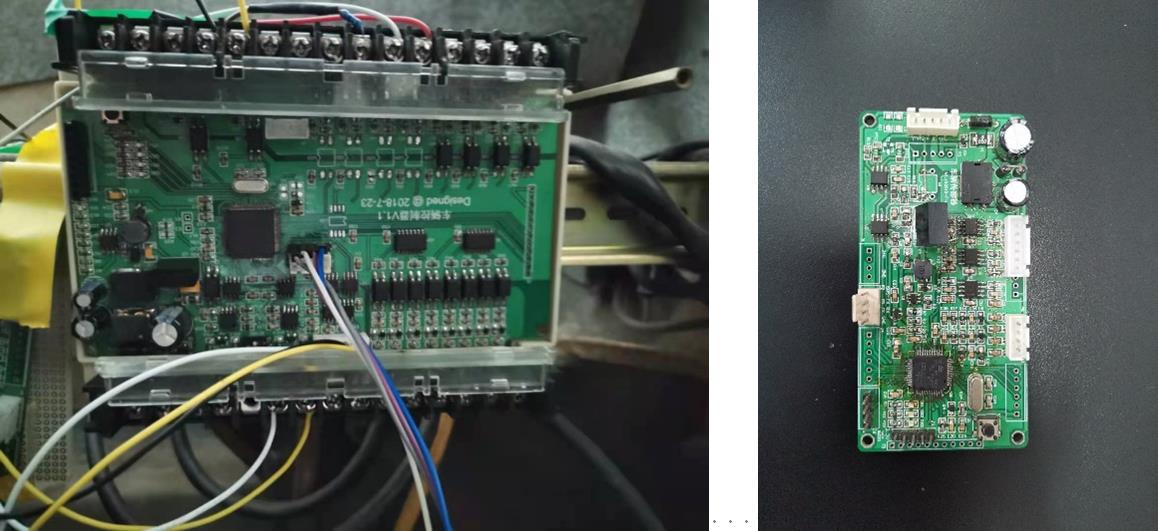
图5 智能驾驶控制器与信息采集板

图6 车辆方向盘改造

