柔性生产是工业自动化的趋势,视觉定位和运动控制是柔性自动化设备的核心技术。目前行业通常采用plc+工控机+单目相机的方法对设备自动控制;这种控制方式对开发人员专业性要求较高,产品开发周期长,硬件成本高,而且采用的PLC多种多样,通用性较差。
为解决以上问题,本项目采用视觉技术和嵌入式处理技术,开发一种基于视觉的通用柔性控制系统。采用双目摄像头和卷积神经网络(CNN)技术实现视觉定位;采用包含ARM内核的FPGA芯片取代传统工控机,通过FPGA硬件实现视觉处理算法,解决普通工控板CPU处理速度问题,通过ARM内核内嵌linux操作系统实现常规软件控制;研发具有自主知识产权的运动控制器,具备以太网、MODBUS、485 MODBUS、高速输入输出、模拟量数字量输入输出等功能,研发符合IEC标准的上位机编程软件,取代PLC。将视觉识别定位时间缩短到原来的1/3;新产品软件开发时间缩短到原来时间的1/2;控制系统的硬件成本减少到原来的2/3;不需要储备懂多种PLC编程和懂视觉算法的开发人员,不需要建立多种PLC库存商品,大大降低了企业硬件成本和开发成本,提高了企业市场的应变能力和竞争能力,给企业带来明显的经济效益。具体系统结构与实物图如图1-2所示。
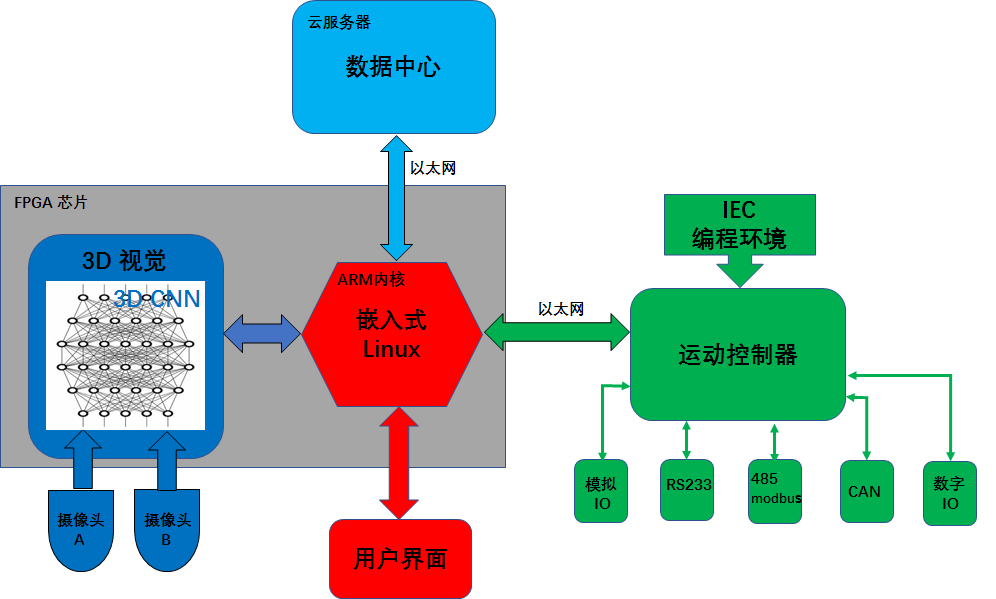
图1.系统架构图

图2.控制系统实物图

