《车道级智能防闯入主动预警跟随车系统开发》是我校自主研发设计的车道级智能防闯入主动预警跟随车系统,开创了国内外道路养排作业、交通事故处置“变被动为主动预警”新时代。
该系统集雷达探测、视频车道线检测、超声波防撞检测、LED信息显示、GPS定位、智能跟随等功能与一体。工作时,将智能跟随车主体车置于作业区警戒区中间位置,副机放置在工程车辆内。当工程车辆缓慢移动时,作业区随之前移,跟随车根据GPS定位信息,通过摄像头检测车道线,超声波防撞检测功能,无人驾驶系统控制跟随车主体在安全区域直线运动,实现作业区与警戒区的动态变化。当有危险车辆进入警戒区200米范围内,系统通过雷达探测,向上游车辆发出声音警报。
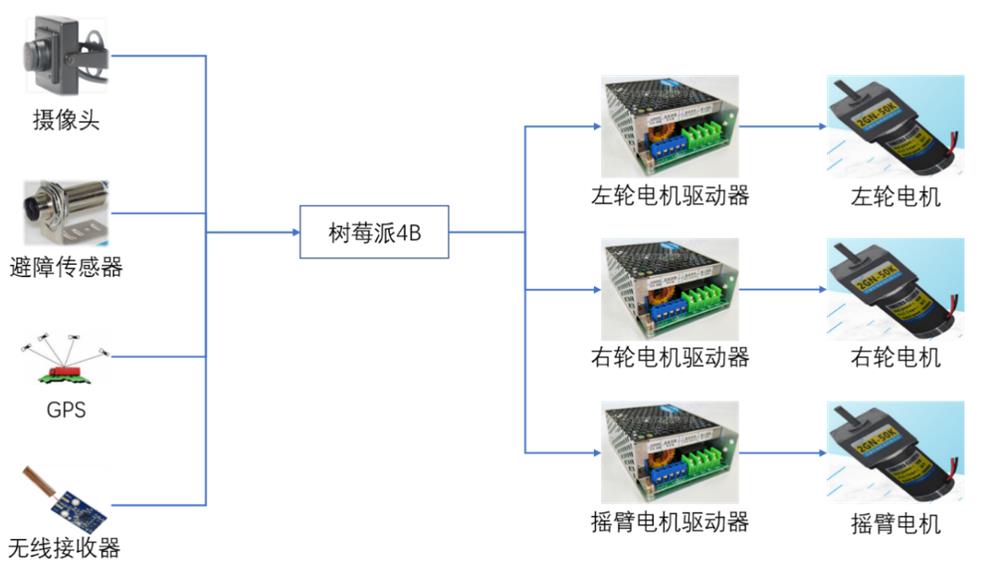
图1.智能跟随车系统构架图
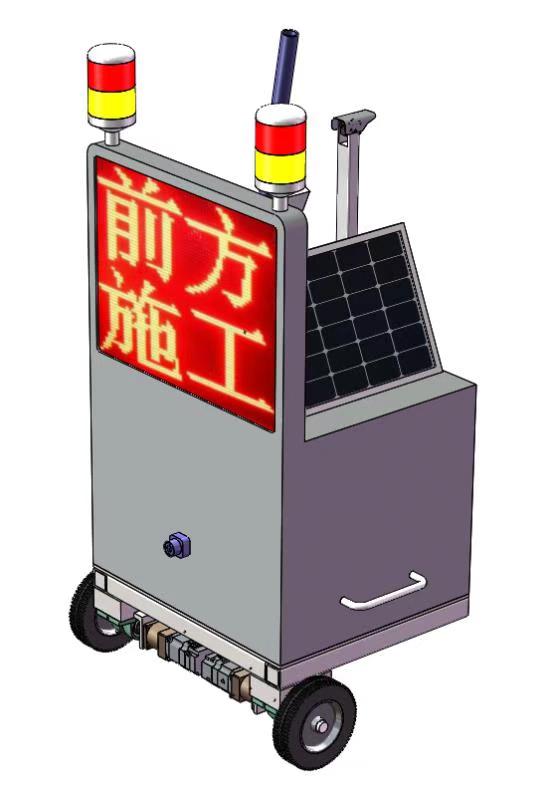
图2.智能跟随车系统效果图

