山东交通学院依托行业重点实验室“云基物联网高速公路建养设备智能化实验室”,联合利煜川(济南)工程科技有限公司研发了“挖掘机挖掘深度与位置自动监管系统”,并在济南某机场实际工地测试应用,实现了挖掘机作业监管的信息化、自动化与网络化,推动了“互联网+智能制造”在“新基建”领域的研发与应用。

图 1. 现场施工图
该设备采用北斗定位技术、结合多传感器融合技术,完成对挖掘机挖掘行为的三维建模,实现了对挖掘机群的挖掘深度与位置的自动化检测;构建了云端服务器,将相关的施工与检测信息上传至服务器,实现对集群施工数据的存储与分析,实现多挖掘机挖掘质量实时监测;采用4G传输技术,设计了远程监管终端,可通过远程计算机或移动终端对施工过程实时监测,实现施工任务的在线规划与任务下发。
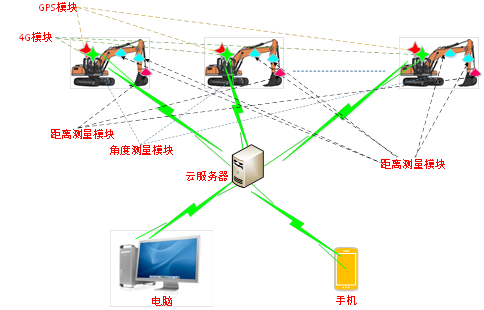
图2. 多挖掘机施工监管系统结构
现场施工数据表明:深度检测误差2cm以内,位置检测误差5cm以内,施工效率提高了2倍。该系统的研发成功加快了挖掘施工项目进度,提高了项目管理效率,减轻了企业经济投入。

