《全自动施工电锤车》是我校自主研发的一种可以在高速公路隧道电缆沟内自动进行打孔作业的工程车辆,弥补了人工打孔的弊端,填补了目前行业内的空白。
电锤车可以实现行进、升降和外伸三个方向的轴运动。为了精确定位打孔位置和打孔深度,升降和外伸部分使用梯形丝杠进行传动,丝杠导程分别为6mm和5mm。电锤车每周期内的工作流程可以分为“行进”、“钻头空伸至墙壁”、“打孔”和“钻头空回至墙壁”和“原点回归”,按照前四个流程是否连续进行,设计了手动、半自动、全自动三种施工模式,可以实现自动前进到设定距离、自动外伸打孔、自动原点回归等功能。此外,行进距离、打孔速度等运动参数可以调整。在默认参数下,全自动施工模式每小时可以完成110米的施工。
硬件部分主要包括:行进支承外车架系统、冲击钻孔升降系统和电控系统。行进支承外车架系统提供整车的支承和升降部分的导向,抵抗全车的冲击载荷;冲击钻孔升降系统提供电锤安装平台,电锤间距可调;电控部分以西门子S7-1200系列PLC为核心,包括显示触摸屏、电机驱动器等。其中在触摸屏中可以选定电锤车的施工方式、设定电锤车的运动参数和查看统计信息等。电控部分系统框图如图1所示,电锤车实物图如图2、图3、图4所示。
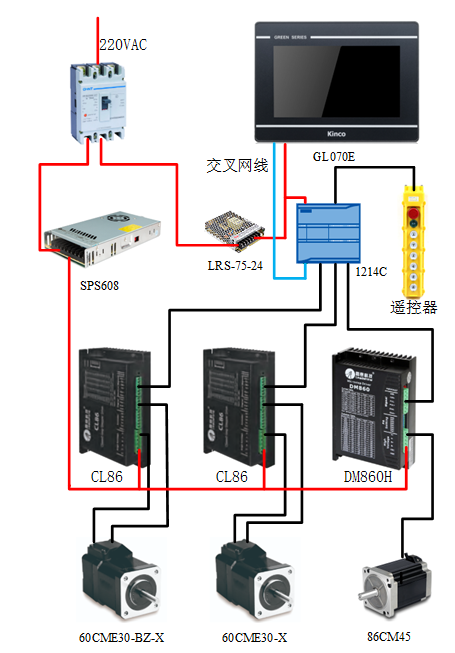
图1 电控部分系统框图
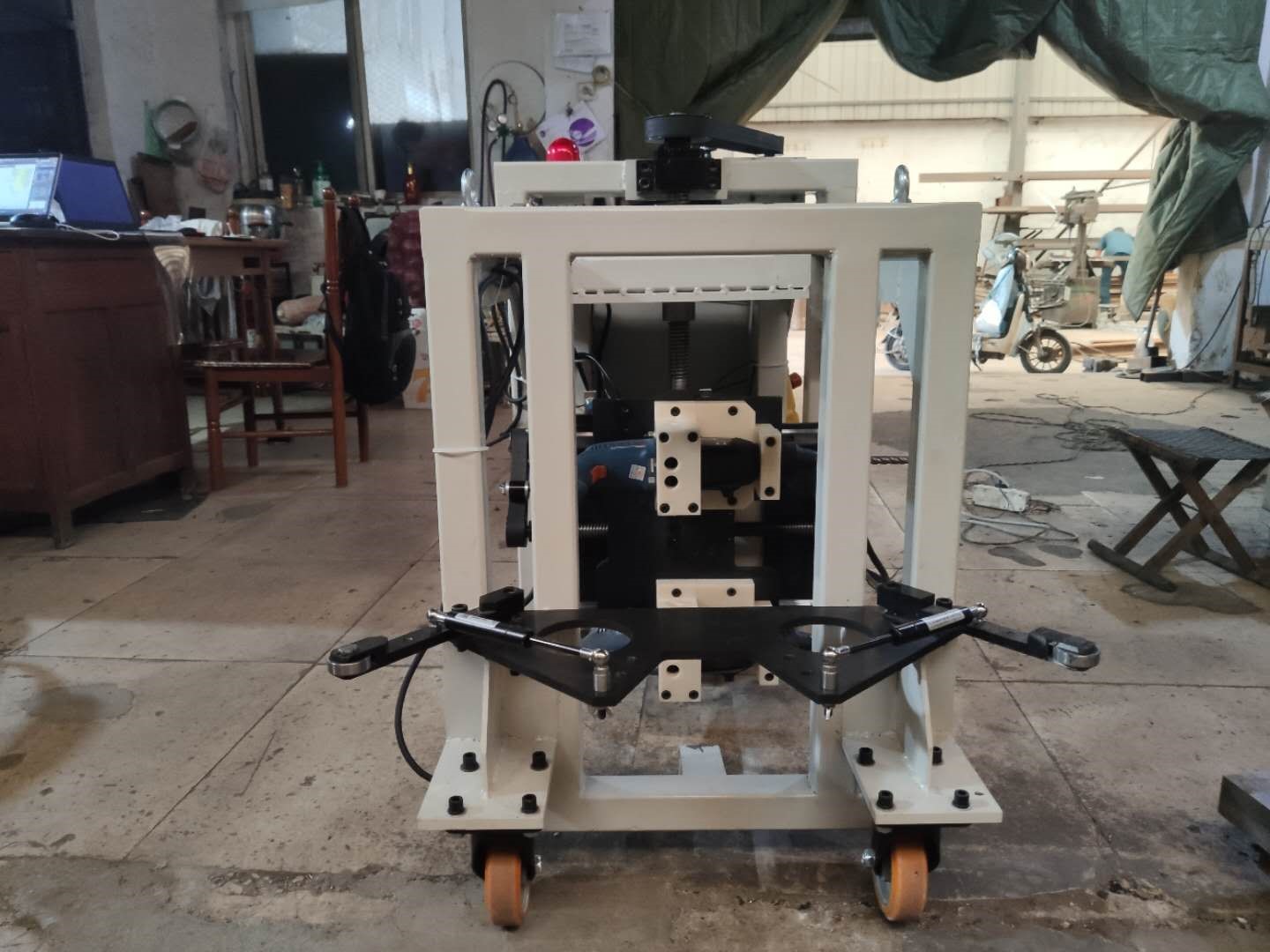
图2 电锤车前视图

图3 电锤车后视图

图4 电锤车侧视图

